Der Grundgedanke
Dissertationsthema:An Observability-Driven System Concept for Monocular-Inertial Egomotion and Landmark Position DeterminationZur Dissertation von Marcel Markgraf Git Repository
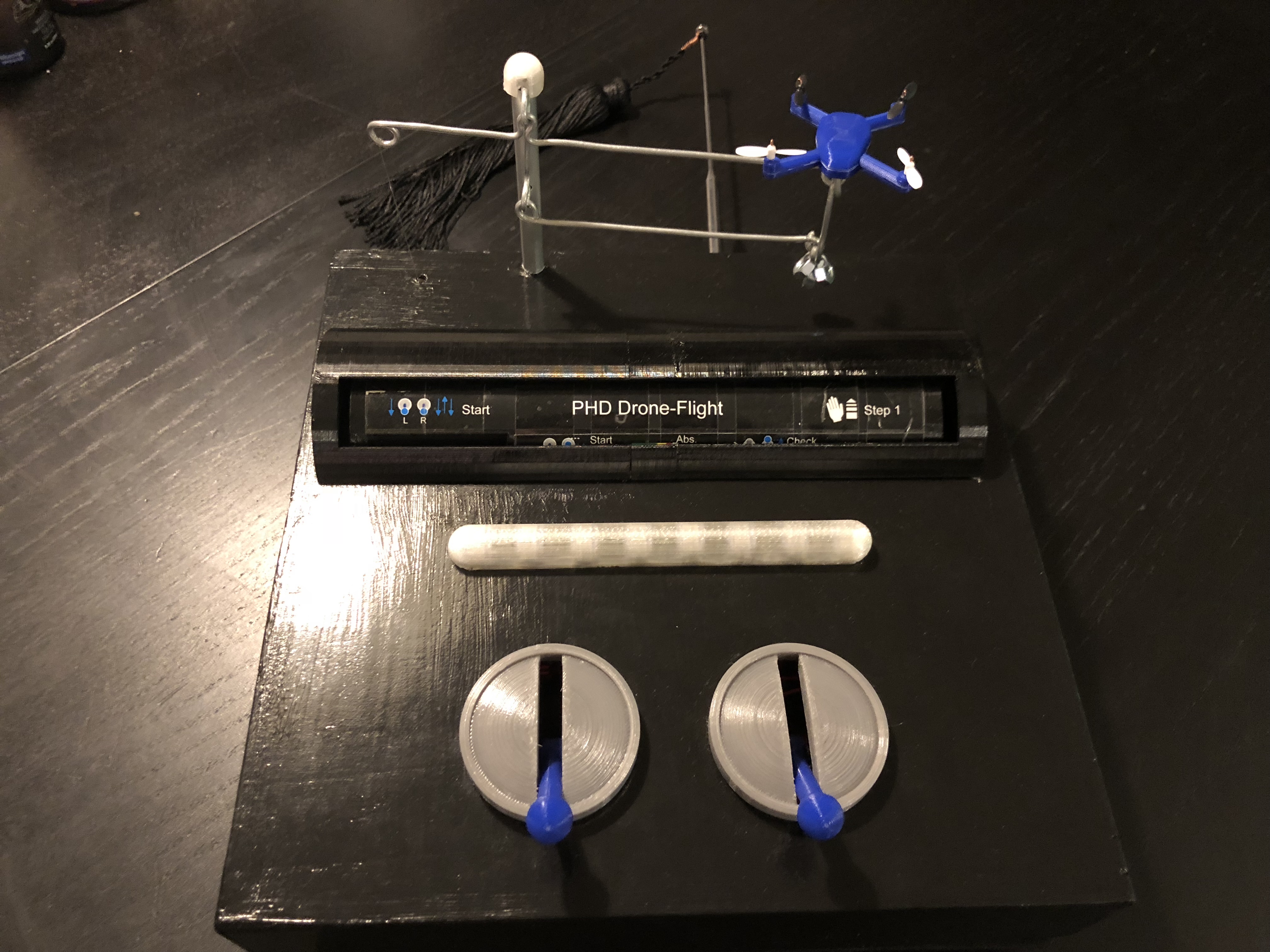
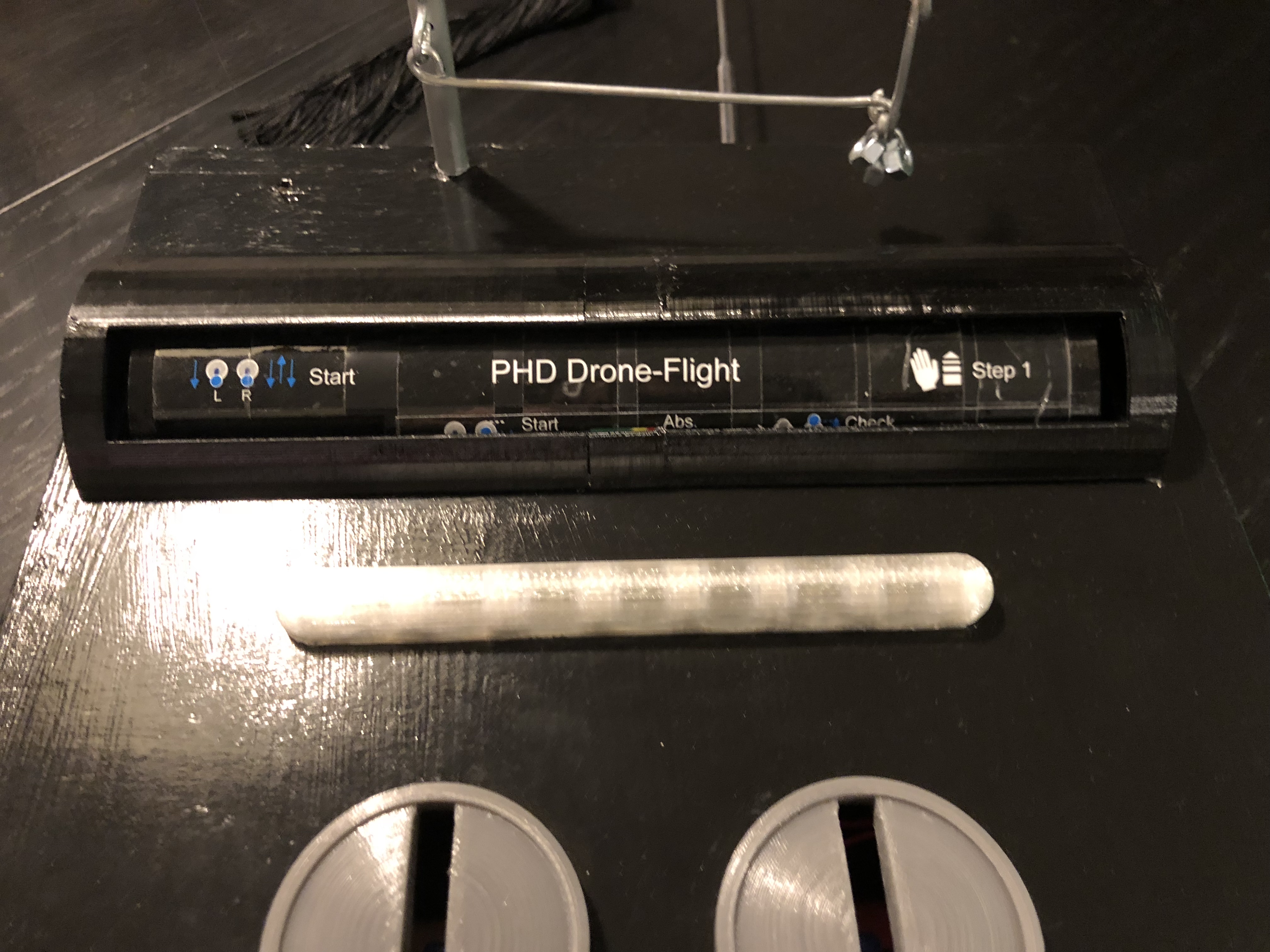
Dieser Hut spiegelt 1:1 das Prinzip des in der Dissertation entwickelten Algorithmus wieder (zumindest, was die Erbauer davon verstanden haben). So wird aus der bekannten Absolutgeschwindigkeit einer Drohne und dem Videobild einer nach unten gerichteten Kamera die Höhe der Drohne ermittelt. Marcel hat sich auch im Rahmen der Lehre mit dem Thema der Drohnen bzw. Quadkopter beschäftigt, sodass sein Hut das Äußere einer Fernbedienung aufweist. Über den rechten Hebel kann das Rätsel gesteuert werden, das ihm nacheinander vier verschiedene
Filmaufnahmender Drohnenkamera zeigt und auf einem Balken die Absolutgeschwindigkeit anzeigt. Über den linken Hebel kann jeweils die ermittelte Höhe eingegeben werden, woraufhin sich eine kleine nachgebildete Drohne an einer Drahtaufhängung nach oben und unten bewegen wird, entsprechend der gewählten Höhe. Sind alle vier
Flügeabsolviert, freut sich die Drohne und fliegt auf und ab.
Galerie